Topics記事
「未然課題」連続インタビュープロジェクト
インタビュー#13 巻 俊宏
東京大学生産技術研究所 教授|海中プラットフォームシステム学
——海に光を、ロボットに冒険を!
研究室のホームページで、そんなワクワクするフレーズが掲げる巻俊宏氏は、海の中を全自動で動き回る自律型水中ロボットなどを開発し、新しい海中海底プラットフォームシステムを提案しています。
巻研究室で開発した水中ロボット「MONACA」は、64次南極地域観測で南極探査を行い、その様子はテレビニュースでも放映されました。巻氏に水中ロボットの開発と未然課題についてうかがいました。
水中のルンバ?! 自律型水中ロボットAUVの開発
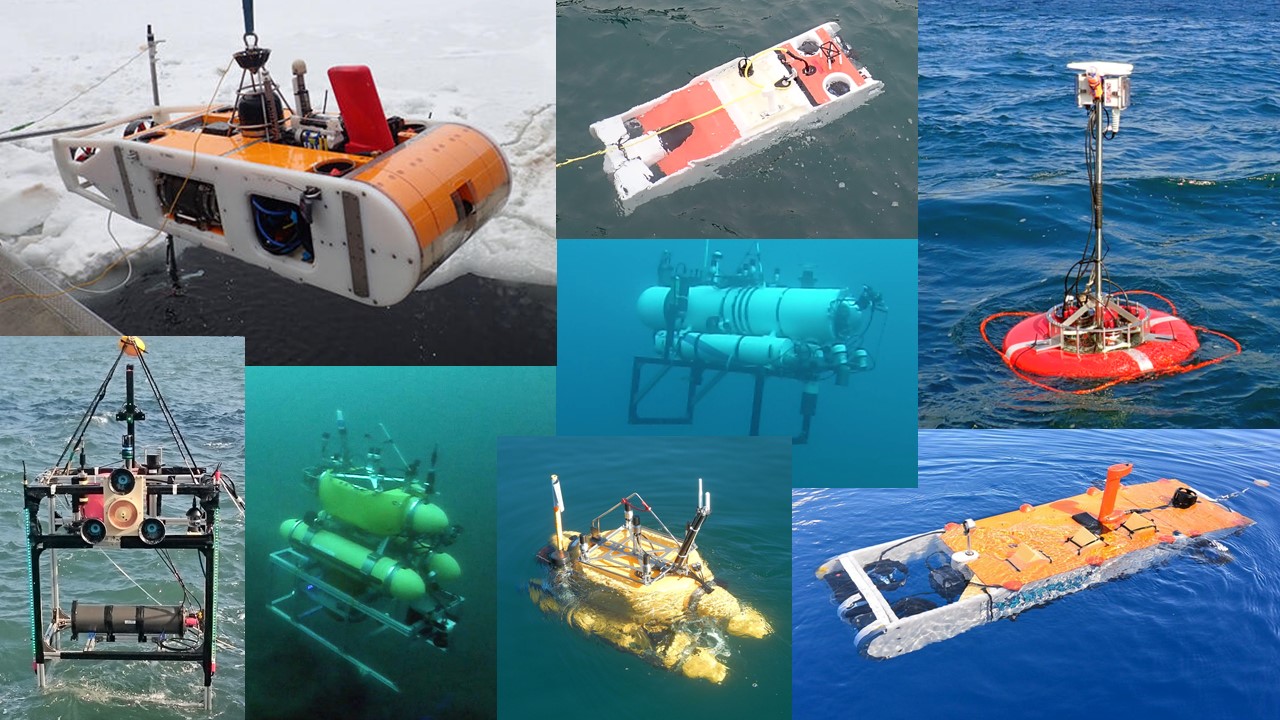
水中ロボットには主にAUV(Autonomous Underwater Vehicle)という自律型ロボットと、ROV(Remotely Operated Vehicle)という遠隔操縦ロボットの2種類があります。前者は全自動型ロボットで、後者はケーブルを介して人が船上などから遠隔操作するロボットです。掃除機に例えるなら、AUVがルンバなどのお掃除ロボット、ROVが従来のコード付き掃除機というイメージです。
このうち、私の研究室ではAUVを中心に、ROVや小型無人ボートASV、海底ステーションなどの複数のプラットフォームを組み合わせて1つの観測システムを構築し、新しい海中海底プラットフォームシステムを提案することを目指しています。
私は学生時代、海中ロボット研究の第一人者である東京大学の浦環(うらたまき)教授の研究室に所属していました。複数ロボットを組み合わせた研究は当時から行っていましたが、研究者として独立した際、特にこの分野を中心に研究していこうと考え、「海中プラットフォーム学」という名称を考えました。
現在、複数のロボットを同時に運用する方法は、さまざまな分野で注目されています。ロボット工学では、これをスワームロボティクス(群ロボット)と称します。アリの大群のように、大量のロボットを群れで動かすことで、1台ではできないことを行うという発想で、提案自体はかなり以前から行われてきました。
同じ種類のロボットが複数いれば広範囲を観測できるため、単体の場合より観測効率が上がります。例えば沈没船の捜索のような、広範囲の調査を迅速に行う必要があるミッションでは、当然、ロボット1台より2台のほうが、同じ時間で倍の範囲を見ることができます。
あるいは異なる種類のロボットを組み合わせた場合、例えば1台目はソナー(超音波)で広い範囲をおおまかに観測し、気になった箇所を、カメラを搭載した2台目が細かく見るというように観測の切り分けが可能になります。
水中ロボットはあまり大きいと運用しにくく、ある程度、用途を絞る必要があるため、異なる種類のロボットを連携することにメリットがあるのです。
ただ、複数のロボットを使う実験を、実際にやろうとするとかなり大変です。1つは金銭面の問題で、自律型水中ロボットAUVは、高度なものになると1台数億円はします。また技術面でも、従来、ロボットを構成するセンサやスラスタ(推進器)など要素技術に制約がありました。
近年はそれらの技術が著しく発展し、信頼性も向上したことと、水中ドローンのような安価な技術が出てきたことで、複数ロボットを使った実験が実際にできるようになってきました。
どのような地形でも自律走行できるナビゲーション手法の開発
当研究室で特に力を入れているテーマは、ロボットが周りの環境を認識してどのように動くかを自分で決めるナビゲーション手法です。ロボットが水中で自分の位置を認識するというのは難しく、まずGPSは使えませんし、周囲もあまり見えないため、カメラを使うことも簡単ではありません。
潜水艦など従来の手法では、慣性航法装置というものを使っています。ただこの方法では、時間と共に誤差が溜まりますし、非常に高価で、安くとも1000万円以上します。
そこで私の研究室では、さまざまなセンサを組み合わせ、周りにランドマークを置いたり、自然のランドマークを見つけたりすることで、それに対して相対的に動くという手法を取り入れています。これを相対ナビゲーションといい、当研究室のメインテーマの1つです。特に、私たちが開発している緻密な動きを可能にするナビゲーション手法は、他ではあまり行われていないもので、当研究室の強みでもあります。
私はもともと、博士課程でロボットのナビゲーション手法をテーマとし、非常に細かく自分の位置推定を行うロボットのナビゲーション手法を開発しました。ロボットが複数のソーナーのほか、カメラを使って周囲の障害物を認識し、ぶつからないよう移動していく様子をビデオでご覧いただくことができます。
このような手法で海底の地形計測と写真撮影を行い、作成した鹿児島湾の海底画像マップが下の写真です。
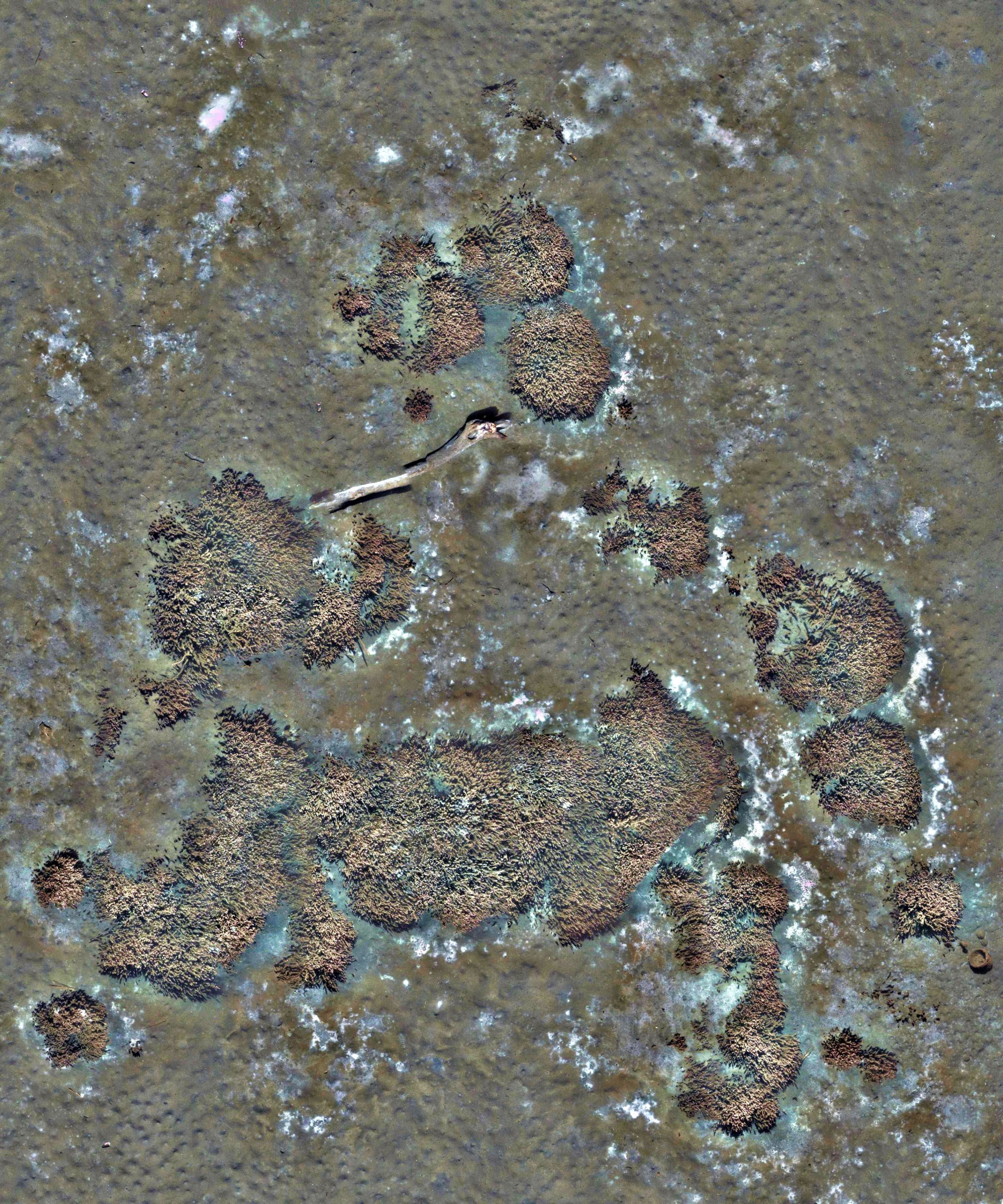
鹿児島湾の海底画像マップ

上図の拡大
これは全体で約15メートル四方の範囲の海底地図となります。海水が濁っていたので、海底まで1.5メートルほどまで近づき、海底に沿って移動しながら約2メートル四方の範囲を撮影を繰り返し、それらを組み合わせて1枚の海底地図をつくりました。
空き缶や手袋などかなり細かいものまで写っています。同じ空き缶がたくさん落ちているのは、この海域で漁をしている漁師さんのお気に入りのブランドでしょうか。
上記の鹿児島湾の海底地図は博士論文の研究成果ですが、今後さらにこのような海底地図を広範囲で作成したいと考えています。これを私たちは「海底Google Earth」と呼んでいます。Google Earthで新たな発見があるように、海底でも意外なものが見つかるかもしれません。また、海底考古学の分野でもこの手法は使えるのではないかと考えています。
このような海底マッピングは、遠隔操作ロボットのROVでもできないことはありませんが、何時間もかけてひたすら海底に沿ってロボットを走らせないといけないため、時間がかかりますし、船で遠隔操作している人も大変です。この点、私たちが開発しているAUVはすべての行程を全自動で行うため、メリットが大きいです。
ただ水中でロボットがどのような状態になっているかは、我々にはわかりません。お掃除ロボットのようにどこかにひっかかって動けなくなっても、水中では助けに行くことができません。実際、帰ってこられないリスクもあります。
幸い、当研究室のロボットは帰ってこられなくなったことはありませんが、世界的に見るとなくなってしまうケースが少なからずあります。通常、海底の地形の事前情報は粗いものしかありませんから、それでも帰ってこられるようなシステムを考えなくてはなりません。
海中で「隠密行動」をする「HATTORI」とそれをサポートする「BUTTORI」
実は日本国内では、AUVの導入があまり進んでいません。その理由の1つは上述のようになくなるリスクがあることです。海外では、海底油田の探査などで、1台10億円という高価なAUVが導入されていますが、そのような高級なAUVは、巨額を投じて、なくならないような対策を厳重にしています。これは非常に資本力のある企業でなければできません。
このような経緯で7年ほど前に、安価なAUVをつくりたいと考えました。当時、私はサバティカルでアメリカ留学しており、新しいことを考える時間が少しできたこともあります。またそのころ、水中ドローンなど安価なロボットが出始めていました。
水中ドローンというと、空を飛ぶドローンの水中版のようなものを想像するかもしれませんが、実は全くの別物です。ケーブルを介して操作する遠隔操作ロボットROVの小型版で、ドローンを水中に投入したあとは、人が船上で画面を見ながら操縦します。価格は数十万円程度、高くても100万円程度です。
一方、全自動型水中ロボットのAUVでは、安価なものはあまり開発されていませんでした。そこで、安くてもきちんと使えるAUVができないかと考え、帰国後、HATTORIという低コストAUVを開発しました。価格的にはこれまでのAUVの10分の1程度です。そのためにセンサも絞り込みましたし、海中に投入する際に大きなクレーンを使わずに済むよう、人が1人で持てるサイズにしました。長さは1mとコンパクトです。
HATTORIの役割は主に海底の画像観測で、サンゴ礁のような起伏に富んだ海底を、低高度でなめるように動くことができます。HATTORIだけでは自己位置推定ができないので、支援用にBUTTORIというASVも開発しました。
HATTORIが海底を調査している間、海上のBUTTORIがそれを追いかけながら、超音波でHATTORIの位置を常に計測しています。また、BUTTORIはその情報を無線で船に送るという通信の仲立ちもしており、これにより遠く離れた船からHATTORIの様子を知ることができます。
それ以外のHATTORIの使い方としては、構造物の周辺の調査などです。この場合は障害物センサで構造物との距離を測り、その情報をもとにマップ上で、自分が今どこにいるかを推定して動くということもできます。
HATTORIは研究開発用の試作段階ですが、興味を持ってくださる企業もあるので、今後はさらに実用化に向けた研究ができればと考えています。
なお、なぜHATTORIというかというと、これは水中を素早く隠密に行動するというイメージから某忍者の名前をいただきました。一応、正式名称もあり、Highly Agile Terrain Tracker for Ocean Research and Investigationといいます。ただ、「HATTORI」の名前のほうが先です。それらしい正式名称を考えるというのも、私の重要な任務なので、ネーミングは私が一元管理しています。
HATTORIと連携して使うことが多いBUTTORIというASVの名称は、もともと名付けに苦戦し、しばらくはただブイと呼ばれていました。ところがある時、HATTORIとブイを同時に運用していると、学生が間違って「BUTTORIとハイ」と呼び、それからこの名称になりました。
とBUTTORI(右).jpg)
HATTORI(左)とBUTTORI(右)
海底熱水鉱床の複雑な地形観測のために開発した「Tri-TON(トライトン)」
ロボットの開発は大型プロジェクトの一環として行うことが多いです。上述のHATTORIは安価なロボットを作るという発想で始めたので特定のプロジェクトがあったわけではありませんが、基本的にロボットを作るにはお金がかかるため、大型のプロジェクトに組み込まないとなかなか難しいという現状があります。
例えば私が研究室をもって最初に開発したTri-TON(トライトン)というAUVは、文部科学省のプロジェクトの一環で、海底の鉱物資源探査のために作られました。
海底から熱水が噴き出している海底熱水鉱床という場所があり、その観測が目的です。熱水地帯はかなり地形が複雑です。熱水が出ると周りの海水と反応し、さまざまな鉱物が沈殿して、煙突のような構造物をつくります。これをチムニーというのですが、ある程度のびると倒れるなどして、かなり凹凸のある地形を形成します。
Tri-TONはこのような複雑な海底環境の表面を撮影し、3次元画像化するために開発しました。Tri-TON のプロジェクトが終了したあと、より深い場所を観測するために、Tri-TON 2(トライトンツー)を開発しました。設備自体に大きな違いはありませんが、最大深度がTri-TON が800メートル、Tri-TON 2は2000メートルです。
深いところに行くということは、圧力が増えますので、圧力容器などを頑丈にしなければなりません。また使えるセンサも限られてきますし、深いところでも使用できるセンサは高価で、大きく重くなります。
さらに測位をするための船からの音響通信がなかなか届きにくくなります。それでも使えるような長距離用装置を使うと、これも大きく重くなり、消費電力も増えます。そのような点を考慮して開発したのがTri-TON 2です。
海中ロボットの開発では、多くの場合ベースとなるロボットがあります。Tri-TON のベースは、上述の鹿児島湾の海底を撮影した際に使用したTri-Dog 1(トライドッグワン)で、これは1999年に浦研究室で開発されたものでした。
生産技術研究所の海中ロボット水槽には、浦研究室で開発された歴代の水中ロボットの写真が飾られています。実はその中に、東京大学総長の藤井輝夫先生が1992年に開発したTWIN-BURGERの写真もあります。これは、テレビカメラの情報からロボットが行動を決定する自律型海中ロボットで、当時、非常に新しい発想だったと思います。
とTri-TON-2(右).jpg)
Tri-TON(左)とTri-TON 2(右)
HATTORIやTri-TONの写真を見ていただくと、同じ水中ロボットでも形状が異なることがわかると思います。AUVには大きく分けるとクルーズ型とホバリング型という2種類あり、HATTORIはクルーズ型、Tri-TONやそのベースとなったTri-Dog 1はホバリング型です。
クルーズ型は航行性能、つまり速度や推進効率を重視したタイプです。典型的なクルーズ型ロボットは魚雷のようなデザインで、細長く、後方にプロペラが1つだけついています。このような形状が一番効率よく、広範囲を観測したり、高速で観測したりすることができます。
一方で、クルーズ型のデザインでは前に進みながらでないと向きを変えることができません。目の前に急に、壁が出てきてもよけられません。これに対し、ホバリング型はプロペラを複数持ち、その場で停止してホバリングができたり、上下に移動したり、その場で向きを変える、横に動くということができます。
このタイプは複雑なターゲットのそばで、細かい動きをするようなミッションに向いています。私の研究室では主にこのホバリング型AUVを開発しています。
(2023年1月18日 東京大学生産技術研究所 巻研究室において 取材・構成:田中奈美)
Related topics関連記事
-
2024.03.12
数式を道具に、循環する社会の実現を研究する(下)|本間裕大
#「未然課題」連続インタビュープロジェクト #数理最適化モデリング #最適配置 #凸空間
-
2024.03.12
数式を道具に、循環する社会の実現を研究する(上)|本間裕大
#「未然課題」連続インタビュープロジェクト #数理最適化モデリング #最適配置 #シミュレーション
-

2024.02.14
需要側の視点でエネルギーシステムの課題を考える|岩船由美子
#「未然課題」連続インタビュープロジェクト #再生可能エネルギー #3E+S #デマンドレスポンス #HEMS
-

2024.02.05
宇宙ロボットのインテリジェンスを研究する(上)|久保田孝
#「未然課題」連続インタビュープロジェクト #宇宙ロボット #無人探査機 #はやぶさプロジェクト #宇宙大航海時代