Topics記事

「未然課題」連続インタビュープロジェクト
インタビュー#12 中野 公彦
東京大学生産技術研究所 教授|機械生体システム制御工学
2023年4月、改正道路交通法の施行にともない、自動運転レベル4がスタートしました。これにより、特定の条件付きながら、公道で無人の完全自動運転が実現しました。しかし完全自動運転にはさまざまな課題もあります。
中野公彦氏は長年にわたり、人間と機械のインタラクション(相互作用)をテーマに、自動運転の制御について研究してきました。中野氏に、自動運転の歴史と技術的課題、そして社会の反応の不確かさという未然課題についてうかがいました。
前編に引き続き、後編をお届けします。
<前編:https://oec.iis.u-tokyo.ac.jp/topics/384/>
自動運転「レベル4」解禁で、特定条件下の無人自動運転がスタート
2023年4月、限定的な条件のもとで完全自動運転を行うレベル4がいよいよ始まりました。ただ、これは認可制で、日本での初認可は、福井県の永平寺の門前の線路跡の道路を、電磁誘導線に沿って走行する車両です。
無人の完全自動運転ではありますが、実はドライバーは近くの遠隔監視室でパソコンを見ながら遠隔操作が出来るようになっていて、何かあれば人が介入します。今後はこのように、ごく一部の、サービスカーとよばれる車両から認可を取得していくことになるのではないかと思います。
もし、無人の完全自動運転を一般道路で実現するとなると、まだ多くの課題があります。
例えば信号情報はその1つです。交通量の多い大通りの交差点で、前の車と自分の車の間で信号が変わったときに停止することができるか。あるいは、正面からの日差しが強いとき、信号が赤か黄色かを判断できるか。これは人間でも見にくいことがありますし、前にトラックがいて見えないという状況もあるでしょう。
そのような場合、道路交通法では車は待っていなければならないと定められています。自動運転も当然、法律を逸脱できませんから、信号が見えないときは止まるというシステムにする必要があります。
しかしそうなると、人間が運転していた場合、「行ける」という判断できる状況でも、自動運転の車両は停止するという状況が生まれる可能性があります。そのような車に商品価値があるかは、自動車メーカーの判断になります。
サイレン音の識別というハードル
また、救急車も識別しにくい課題の1つです。救急車すら課題かと思われるかもしれないのですが、実はサイレンの認識は簡単ではありません。
ある一定の音量を検出したら停止するというのは一つの方法ですが、そうすると明らかに中央分離体がある場所で、対向車線を救急車が走ってきたときでも、自動運転車だけ停止するということが起きえます。
他にもドップラー効果を利用して判断するという方法が考えられますが、実はサイレン音にはさまざまな種類があり、救急車とパトカーでも異なるため、音だけでどちらから何が来るか正確に判断することができません。
そこで国の事業として、GPSの通信を活用し、救急車が向かってくるという情報を走行中の自動車に知らせるという実験も行っています。ただこれも完全に動作するとはいかないようです。要因として、情報を受け取ったあと、車両がどのように回避行動にうつるか、通信に用いている携帯回線で生じる時間遅れをどうするかなどの課題があります。
これは2024年度ごろまでには解決しなければならない大きな課題なのですが、まずは、一定のレベルのサイレン音を検出したら、ゆっくりと速度を落として停止するというしくみになるのではないかと思います。
自動運転は右折が苦手
上述の音の認識もそうですが、人間の高次の判断は、やはり機械ではできないと考えています。特に顕著な課題が右折の判断です。
道路交通法では優先の方向を妨げないことが原則です。そこで右折の際は、それにかかる時間を計算し、対向車の距離とスピードから、右折にかかる時間内に対向車が来ないことを確認できれば、右折するという走行方法をプログラムに書き込むことはできます。
ただ、測定範囲を広げるとセンサーで検出できる範囲を超えますし、対向車が制限速度内で走行しているとは限りません。あるいは見えない場所から、人や自転車があらわれるかもしれません。
人がゆっくり歩いている脇から、自転車が飛び出してくるような状況まですべて検出して、確実に安全だと保証することは、ほぼ不可能です。そうすると、永遠に右折できません。
そこで考えられる方法としては、道路交通法で交差点の信号が赤になったとき、交差点内の車が優先して交差点を抜けるというルールを活用し、信号が赤になってから出発していくというものがあります。
しかしこの場合も、安全が担保できるとは限りませんし、人間であれば上手く判断して右折できるところを、自動運転では信号が赤になるまでずっと待ち続けるということになります。
自動運転バスの実証実験に町のインフラカメラを活用する
このようなさまざまな課題の解決にむけ、千葉県柏市、企業、東京大学などによる柏ITS推進協議会では、つくばエクスプレス柏の葉キャンパス駅から東京大学柏キャンパス間で自動運転バスの実証実験を行っています。私の研究室もこれに参画しています。
将来的にはレベル4を目指していますが、現状はレベル2の段階で、運転席にはプロのドライバーが座っています。条件が良ければ、ドライバーはハンドルから手は放し、全く操作することなく、ほぼ自動運転で目的地まで行くことができます。
ただ、路上駐車の車があったり、横断歩道を子供が歩いていたりするような状況で、ドライバーが危ないと思えば介入します。実証実験を始めて3年になりますが、現在まで、幸い自動運転車が原因となる事故を起こしたことはありません。事故が起きると、ドライバーの方のキャリアも傷つけることになりますので、大変ななかでご協力をいただいています。
またこの実証実験においては、レベル4自動運転サービスの社会実装につなげるため、協調型システムの実験を行っております。信号のサイクル情報を送ることにより、急な減速を避けて信号交差点を通過することができています。
また、信号機などのインフラ設備に設置されたカメラにより検知された障害物を走行中の車両に送ることで、より円滑な自動運転を行うことも行う予定です。

道路わきの路側機に設置されたカメラ
これは右折の対向車検知にも活用できます。実証実験ではバスが右折する際、車載カメラとインフラカメラの情報から取得した対向車のデータをもとに、右折の判断等を実現できるのかを検証する予定です。
ただそれでも、課題はやはりいろいろあります。例えば、信号灯色をカメラで判定する場合、認識率は99%以上とも言われています。しかしそれは、1%の未検地や誤検知があるとも言え、これは非常に大きい割合と考えています。
たとえ100万回に1回の誤認識であったとしても、許されるかといえば難しいでしょう。信号情報にずれが生じたことが理由で事故が起きた場合、誰が責任を取るのかという問題が生じます。
レベル2であれば、何かあったときドライバーの責任になりますが、レベル4はドライバーがいないため、仮にインフラセンサーが壊れたという状況で事故が起きた場合、だれに責任があるのか不明瞭になります。するとそのようなカメラを誰が設置しようと思うのか、あるいはコストは誰が負担するのかなどの判断が問われます。
これらは解決すべき問題ではあるものの、まだあまり着手されていません。

協調型レベル4自動運転モビリティサービス実現のため、実証実験中のバス
自動運転バスが町の活気回復に貢献
以上のように、レベル4自動運転サービスにはまだ多くの課題があります。しかし、鉄道が廃線となる場所や、バスが1日数本しかないような場所では、今後さらに自動運転のニーズが高まることが考えられます。
最近、廃線跡を使ったBRT(バスラピッドトランジット)も登場しています。BRTとは、専用道路を使ったバスサービスです。もし、一般道にレベル4の自動運転が入るとすると、そのような場所から導入されるのではないかと思います。実際、JR東日本では、レベル4の自動運転バスの導入を目指した活動を気仙沼等で行っています。
これに関連して、いま、注目を集めているのが、茨城県の堺町です。利根川沿いで、かつては海運が栄えていたそうなのですが、そのために鉄道の路線からはずれてしまい、町に鉄道駅がありません。また過疎化に苦しんでいるという状況でした。
そこでARMAというフランス製の自動運転をベースにして作られたシャトルバスを、レベル2で定期運行させると、町民に歓迎され、知名度があがりました。バス自体は予算をつけて無料にし、その分はふるさと納税で賄っているそうです。
また、自動運転バスという最新技術の導入がシビックプライドにもつながり、新型コロナウイルス感染症のパンデミックも重なって、東京に出ていた人が堺町からでもリモートで働けるということで戻ってきたそうです。
ローカル線に自動運転を入れることが難しい理由
自動車以外にも、鉄道でも自動運転はトレンドです。線路には電車しか走っていないので、技術的には自動車よりやりやすいという面はあるものの、鉄道事故は鉄道側の問題で事故が起きると大きな問題となるため、いまだに多くの路線が自動運転には踏み切れていません。
現在、自動を実現しているのは、東京のゆりかもめなどの新交通システムです。実現できた理由は、基本的に人が軌道に入ってこられない構造にしているためです。神戸のポートライナーなど、無人の自動運転を実現しているところはすべてそのような体制で行っています。
その他の普通鉄道では、まだ完全な自動運転は行われていません。つくばエクスプレスなど一部の鉄道には、自動運転装置が導入されているものの、いまでも発進の判断は人間が行っています。実は発車の判断というのは、鉄道も自動運転バスも同様で、機械には非常に難しいのではないかと考えられています。
本来であれば、ローカル線で自動運転を入れることができるとよいのでしょうが、これも意外に難しく、なかなか実現しません。ローカル線の場合、野生動物をはねるということも比較的多く、その場合、運転手は一度、電車を止めて確認します。万一の場合、人をはねてしまっている可能性もないわけではありません。
そのような状況をすべて確認してから、運転を再開するのですが、無人で自動運転を行った場合、この作業を誰がやるのかという問題が解決されていません。
このように、実は運転手には運転以外の役割がいろいろあります。これはバスも同様で、 事故が起きたときの救出は、ドライバーの義務であることが法律で定められています。その他にも車椅子の方の乗り降りのサポート、車内事故防止など、ドライバーの仕事をあげるとさまざまなものがあり、それらは自動化することが難しいことのほうが多いです。
この点については、ドライバーでなくとも、車掌さん的な役割の人がいるとよいのかもしれません。そうすれば車内安全やサービスも充実しますし、事業者としてもドライバーより車掌の養成のほうがコストを削減できます。
完全自動運転車を実現するために必要な社会変容
その他に自動運転のニーズとしては、除雪車やゴミ収集車などが挙げられます。北海道などで、除雪は非常にコストがかかるそうです。農閑期の方を大量に雇用して、対策をとっているものの、人手不足になりつつあるということでした。
特に除雪車の運転は非常に難しく、雪道ですと歩道は見えませんから、ぎりぎりのところで除雪をしていくためには、非常に高いスキルが必要だそうです。
ゴミ収集車も、現状ではゴミを集める人以外にドライバーが1人いなければなりませんが、自動運転になれば、全員で作業を行うことができます。それによりゴミ収集のスピードが上がる可能性もあります。
このように、自動運転の導入が期待されるところはいろいろあるのですが、完全な自動運転を実現するレベル5は、現状ではまだ無理という認識で、今、考えられているのは上述のレベル4の段階、つまり特定の条件下での完全自動運転です。
それでも10年前を考えると、そのころはレベル3も無理で、最終的に人間が責任を取るレベル2までに留まるのではないかと言われていました。それが今や、限定的ながらも完全な自動運転が行われるようになりつつあります。
ですから、パラダイムシフトはありえると思っています。特に高速道路であれば、すべての車が自動運転になると非常にやりやすくなるでしょう。しかし、一般道は歩行者もいますので、やはりすべて自動ということは難しいかもしれません。それでも発想の転換の1つとして、ヒントになる考え方があります。
例えば、ゴルフ場ではカートが走るところに立ってはいけないという共通認識があります。ゴルフをする方はみなさん、カートにぶつかったらぶつかった方が悪いと考えるでしょう。
自動掃除ロボットのルンバも同様で、ルンバが向かってきたら、ぶつからないように気を付けますし、もはや今ではルンバが掃除しやすくするため、床には物を置かないようにしている人も多いと思います。
自動運転車にも同じことが起きる可能性があります。つまりみなが自動運転を便利だと思えば、街中で自動運転車が走っていたらよけましょうという認識に変わるかもしれません。
そのような共通認識が持つことができれば、ある程度早い時期に自動運転を導入できる可能性もあります。また最終的には、道路を自動運転車が通りやすいように設計し、人間はそれ以外の道を通ってくださいというふうになることも考えられます。

中野公彦氏
社会の反応の不確かさという未然課題
自動運転の分野で考えられる最大の課題は、社会とのフリクション(不和)や社会の反応の不確かさです。これは未然課題であるとも言えるかもしれません。
自動運転が社会に入ることについて、現状では多くの人が好意的に受け止めています。しかしひとたび事故が起きれば、世間の反応は変わるでしょう。ただそれも、状況次第です。
酔っぱらいがふらふら歩きながら、自動運転車にぶつかってきたら、その人が悪いという議論になるかもしれません。一方、幼い子供が道路に飛び出して、自動運転車がはねてしまったという場合、機械の制御方法は全く変わらないにもかかわらず、世間の反応は大きく異なるはずです。
そのように世間の反応というのは不確かな部分が非常に大きいと感じています。自動運転の導入にあたり、社会との関わりの不確かさをどのように見積もり、いかに対応していくかは非常に大きなテーマで、私が参画するELSI(倫理的・法的・社会的課題)のプロジェクトでも、これについて議論を重ねています。
本質的な問題は、自動車には安全基準があり、それに則った数値が定められているものの、賞味期限と同様で、その数値を超えたら問題だとは断言できないということです。
そして賞味期限が人によって、「このくらいであれば大丈夫」と思う感覚が異なるように、自動運転の安全基準も、それを人々が受け入れるかどうかの影響は読みにくく、このような状況にいかに対応しながら実装していくかは、工学全般の今後の大きな課題ではないかと考えています。
「社会の不確かさ」をより確実にするための多様な議論
特に、自動運転は社会へのインパクトが大きいです。影響を受ける人は、自動車を利用している人だけでありません。歩行者や自転車などを含め、全市民が否応なく影響を受けます。このような場合、合意形成は難しく、社会受容性が醸成した、つまり社会に受け入れられたということは、永遠に断言できません。
なぜなら、受容されたと思っても、上述の子どもの事故のようなことが起きれば、たちまち受容性が崩れるからです。また、最終的に受容性がゼロとなる可能性も捨てきれません。たとえどれだけ自動運転の技術を高めても、この不確かさの部分がどうなるかは誰にもわかりません。そのなかでいかに社会実装していくかが一番の課題です。
対策の1つの方向性として、議論の場に、自動運転の専門家だけではなく、他分野の専門家にも入っていただくということが考えられます。
多様な分野の方々と議論をすることで、たとえ事故が起きても、「だから自動運転はだめだ」と非難を受けるだけでなく、事故を踏まえてどうしていくかというより広い議論につながります。また、そのようなインタラクションは、社会の不確かさに対するロバスト性を高めることにつながるのではないかと考えています。
そしてこのような課題は、自動運転にかぎらず、AIやデータ利用などさまざまな新しい技術が直面していることではないでしょうか。特に近年、新規技術の社会に対する影響力が大きくなってきたと感じます。
工学者も技術のみを考えればよいのではなく、自らが生み出した物が社会に与える影響まで、考えなければいけないと思っています。
中野研究室:http://www.knakanolab.iis.u-tokyo.ac.jp/
(2023年1月11日 東京大学生産技術研究所 中野研究室において 取材・構成:田中奈美)
Related topics関連記事
-
2024.03.12
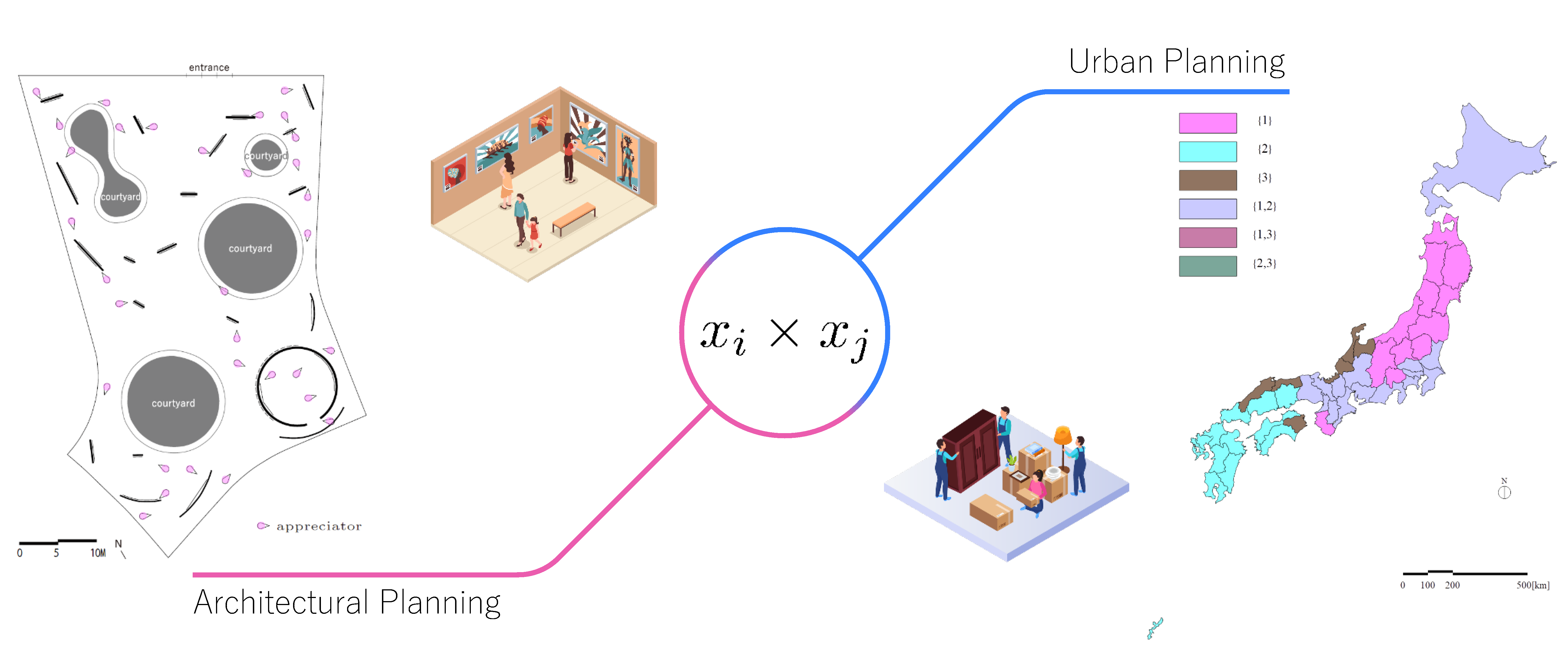
数式を道具に、循環する社会の実現を研究する(下)|本間裕大
#「未然課題」連続インタビュープロジェクト #数理最適化モデリング #最適配置 #凸空間
-
2024.03.12
数式を道具に、循環する社会の実現を研究する(上)|本間裕大
#「未然課題」連続インタビュープロジェクト #数理最適化モデリング #最適配置 #シミュレーション
-

2024.02.14
需要側の視点でエネルギーシステムの課題を考える|岩船由美子
#「未然課題」連続インタビュープロジェクト #再生可能エネルギー #3E+S #デマンドレスポンス #HEMS
-

2024.02.05
宇宙ロボットのインテリジェンスを研究する(上)|久保田孝
#「未然課題」連続インタビュープロジェクト #宇宙ロボット #無人探査機 #はやぶさプロジェクト #宇宙大航海時代