Topics記事
2023.06.06
海中で働く自律型ロボットの未来を考える(下)|巻俊宏
#南極 #兵庫県神戸市 #「未然課題」連続インタビュープロジェクト #自律型水中ロボット #海中海底プラットフォームシステム
「未然課題」連続インタビュープロジェクト
インタビュー#13 巻 俊宏
東京大学生産技術研究所 教授|海中プラットフォームシステム学
——海に光を、ロボットに冒険を!
研究室のホームページで、そんなワクワクするフレーズが掲げる巻俊宏氏は、海の中を全自動で動き回る自律型水中ロボットなどを開発し、新しい海中海底プラットフォームシステムを提案しています。
巻研究室で開発した水中ロボット「MONACA」は、64次南極地域観測で南極探査を行い、その様子はテレビニュースでも放映されました。巻氏に水中ロボットの開発と未然課題についてうかがいました。
前編に引き続き、後編をお届けします。
<前編:https://oec.iis.u-tokyo.ac.jp/topics/394/>
ロボットにお守りを入れて無事を祈る
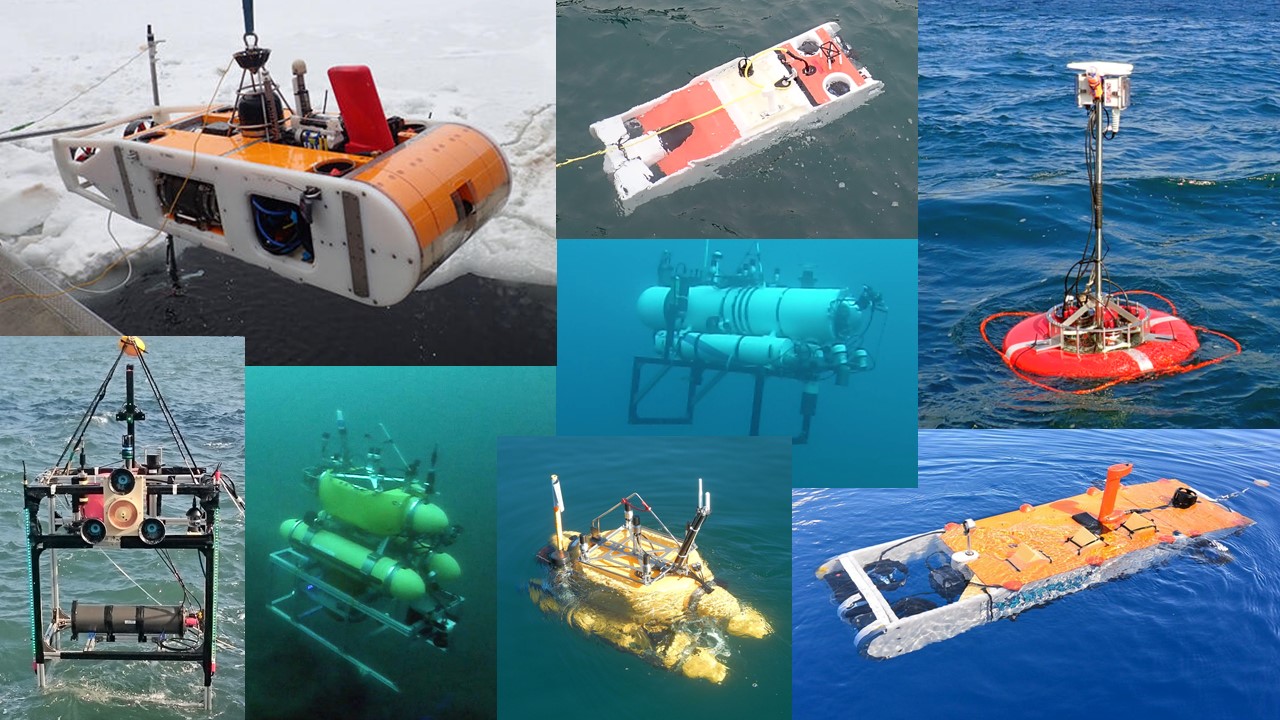
海中ロボットを開発するためには、幅広い学問領域の知識が必要です。もともと、ロボット工学自体がそのような面が強いのですが、海中ロボットの場合は水中で動くので、水の流れや水から受ける力などを考慮することが非常に重要で、ロボットのデザインにも深く関わります。これは流体力学の領域です。
またはロボット自体は機械と電気の塊およびプログラミングで構成されているため、センサなどを扱うための電気系や情報処理の技術も必要ですし、近年では高度な推定を行えるよう機械学習なども取り入れています。
またそれぞれの要素のバランスも重要で、ある問題が解決できても、それによって他に問題が生じれば、結局、ロボットは動きません。各専門分野を一通り理解していなければ良いロボットは開発できませんし、新しい技術をどんどん勉強していくことも重要です。
当研究室の学生は修士1年のチームで「水中ロボットコンベンション(水中ロボコン)」というイベントに出場し、AUVをつくるのはかなり大変だということを体感してもらっています。細心の注意を払って開発しても、壊れるときは壊れますから、自分で修理できるようになる必要もあります。
壊れるということに関しては、私もまた、常にロボットに振り回されています。一番怖いのは、原因が分からないことです。ひとまず様子を見るしかありませんが、プロジェクトは期日が決まっていることが多いため、解決できない場合、それが発生するかもしれないことを前提に問題が起きてもよいような準備をします。
ロボットの開発はいつでも大変です。でもそれが楽しくもあります。AUVは帰ってこられないリスクもあると書きましたが、きちんと帰ってきたときは、「よくやった!」という気になりますし、達成感もあります。それだけ一筋縄ではいかないのです。
いつでも無事に帰ってこられるようロボットの中にお守りを入れています。航海の神様で有名な神様は金刀比羅さんで、東京では虎ノ門にも金刀比羅宮があります。また出張で有名な神社に行く機会があると、買ってきた新しいお守りをロボットに入れたりしています。
最近、64次南極地域観測で南極探査を行ったMONACAというAUVには、厳島神社のお守りを入れていました。
巻俊宏氏
研究室で開発した水中ロボット「MONACA」、南極へ行く
このMONACAは「GRAntarcticプロジェクト」の一環として開発したものです。これは新学術領域研究という大型の科研費プロジェクトで、国立極地研究所が中心となり南極研究を推進することを目的としています。MONACAは目玉プロジェクトの1つで、当研究室の研究員と学生がMONACAとともに、南極観測船・砕氷艦しらせで南極に赴きました。
実は、AUVによる南極探査は、日本ではMONACAが初の試みとなります。世界的には、特にイギリスが先行しています。イギリスはAUVを氷河の裏に入れ、50キロメートルほどの距離を観測しています。これは素晴らしい成果ですが、氷から比較的離れた、深い海を往復するというもので、取得できるデータは限られます。
一方、MONACAは氷のそばを進み、搭載しているマルチビームソナーという超音波で氷の裏の地形の形状を測定するほか、カメラによる氷表面の画像観測も狙っています。
南極の氷は地球の真水の9割を占めていると言われており、南極の氷のボリュームを知ることは、今後の地球環境の変化を予測するために必要不可欠です。飛行機や人工衛星では、海面上の標高はわかるものの、水面下に何メートルあるかまではわかりません。そこでAUVを入れて氷の裏を測定することで、氷の正確な形状とボリュームを把握しようという試みです。
MONACAは当研究室の強みであるナビゲーション手法をいかし、複雑な氷を認識してぶつからずに動けるため、氷のそばを進むことができます。また船から沈めた音響ランドマークを目印に迷わないで帰ってくることもできます。
海氷の厚さは非常に薄いものもあれば、10メートル近い深さまで成長したものもあります。さらに大陸から伸びている棚氷に至っては数百メートルほどの厚さがあります。MONACAは棚氷の裏へ入っていける能力を持っています。
日本では北海道の港でテストをしましたが、南極の氷は北海道のものよりもさらに厚く、流れもあります。加えて、しらせは舷の高さが10メートルほどあり、そこからMONACAを降ろしたり回収したりするのが大変です。
特に回収の際は、フックのついた長い棒をつかって引き上げるのですが、10メートルもあるとなかなかうまくいきません。南極から時々、報告を受けていたものの、通信状況も非常に限られ、気持ちは子供にはじめてのお使いをさせる親のようでした。しかもまだよちよち歩きなのに、いきなり南極に行って任務を遂行しなければいけないわけです。とにかく無事に帰ってくることを祈っていました。
幸い、海氷探査6回、中層探査2回、海底探査5回を成功し、各種データも取得して、2023年3月の終わりに無事、帰国しました。予定していたミッションを全てクリアできたわけではないのですが、とにかくホッとしました。
なおMONACAの名前の由来は南極です。南極といえば氷、氷といえばアイス、アイスといえばモナカということでこのような名前になりました。
形状も抵抗を少なくするために平たい長方形ですし、表面に浮力材を置いたところ、サイズの関係で分割しなければならず、色もAUVで定番の目立つオレンジを選んだため、結果として、アイスモナカのようなデザインとなりました。
正式名称はMobility Oriented Nadir AntarctiC Adventurerといいますが、これもあとから私が考えました。
と南極でミッション遂行中のMONACA(右).jpg)
MOANACA(左)と南極でミッション遂行中のMONACA(右)
水中ロボット用充電ステーションのしくみを考える
日本国内でAUVの導入が進んでいないと上述しましたが、水中ロボットの海洋利用は今後増えていくのではないかと感じています。特に最近、洋上風力発電が増加しています。建設やメンテナンスの際に水中調査が必要になりますので、そのような場所で水中ロボットが使われるのではないかと考えています。
当研究室では海中プラットフォームシステムの研究の一環として、AUVをステーションにドッキングさせる技術というものも開発しています。イメージとしてはお掃除ロボットの充電ステーションです。
具体的には、海底ステーションを岸壁に沈めておき、ロボットは定期的に出ていき、構造物の点検をしたり、パトロールをしたりして、電池がなくなったらステーションに戻り充電します。また充電中にステーション経由でデータを陸上に送るしくみも研究しています。
海底ステーションを使ったロボットの展開は、アイデアとしては30年以上前からあり、クルーズ型のAUVV向けのステーションはすでに開発されています。これは巨大なラッパのような形状のものを水中に沈めておき、ロボットがそのラッパの口に入ってドッキングし、充電をするというシステムです。
一方、私の研究室で取り組んでいるのは、ホバリング型AUVに向けたステーションです。 ホバリング型の場合は、複雑なロボット制御が可能となるので、ドッキング装置が小型でも正確に位置合わせできるので、大きなラッパ型の設備を作る必要はありません。こちらはまだあまり開発されていない分野だと思います。
ウミガメ追跡ミッションに活躍する「HATTORI」
その他の現在進行中のプロジェクトとして、AUVで生き物を認識し追跡するというミッションを試みています。2018年にはウミガメの保護活動をしている神戸市立須磨海浜水族園の協力を得て、保護したウミガメが泳ぐ神戸空港近くの浅瀬に、HATTORIを展開しました。
HATTORIは水面を自由に泳ぐウミガメを認識し、4メートルの距離を保って追跡します。ウミガメを選んだ理由はゆっくり泳ぐイメージがあったのと、比較的大きく見つけやすく、日本の沿岸にたくさんいて、水族館でも飼育されていて馴染み深かったということがあります。
従来、AUVは海底や構造物など動かないものを観測対象としてきました。海洋生物の追跡をするというのはかなり新しい分野で、動くものを対象にすることで、ターゲットの位置予測や、それを見越した制御などにも新しい課題が生じます。ロボティクスとしてもチャレンジな領域だと思います。しかしこれを実現すれば、従来のように生物にセンサを直接取り付けなくても、モニタリングできるようになります。
実はこの実験は、東京大学大気海洋研究所の佐藤克文先生のご協力を得て行っています。佐藤先生は小型記録計を動物に取り付けて観測を行う専門家です。佐藤先生のお話では、動物を捕獲してセンサをつけること自体が大変だということでした。
そこでAUVを使い、全自動で海洋生物を発見して追いかけるというコンセプトを考えました。いずれはイルカやクジラなどにも応用したいと思います。ただ、海洋生物の泳ぐスピードはだいたいどの生物も平均約四ノットつまり毎秒2メートルだそうです。これは水泳のトップスイマーと同じくらいでしょうか。
一方HATTORIは最大2ノット程度なので、彼らを追跡するためにはロボットの運動性能が求められます。2018年の追跡実験では、ウミガメは非常に協力的(?)でゆっくり泳いでくれましたが、本気で逃げられると追うことはできません。
AUVの速度を上げることは技術的には可能ですが、消費エネルギーが増え、短時間しか動けなくなるため、長時間の追跡は難しいです。そこで、一時的に引き離されたとしても見失わずに追跡する、いわばスパイのような行動をさせることを考えています。そういう意味でも「HATTORI」なのです。
船を使わない海底調査を実現するための水中ロボット的未然課題
現在、船を使用しない海洋調査という流れがあります。調査船のコストは高く、大型船の場合、1日数100万円~1000万円かかかります。これを解決するための1つのアイデアとして、AUVが港から発進し、長距離を観測したのち、港に戻るという方法が考えられます。
しかし港近くには、他の船がいたり、ゴミが落ちていたり、釣りをしている人もいます。そのような環境で、ほかの船や障害物を見つけたら、きちんとよけて港に戻ってこなくてはなりません。
釣り糸の探知は、地味ながら大事な問題だと考えています。釣り糸は細いので探知が難しい一方で非常に強く、もしもプロペラに絡まったら、ロボットは回収不能となります。そのようなものを探知し、きちんと回避するナビゲーション手法は重要なテーマですが、まだあまり研究されていません。また実際に探知するのはかなり大変だと思います。これは未然課題の1つではないでしょうか。
また、AUVで移動できる距離にも課題があります。解決策として、高密度で高性能な電池を作るという方法もありますが、私は、環境からエネルギーが取れるとよいのではないかと常々考えています。
例えばソーラーAUVというものが提案されています。これは太陽電池をAUVにはっておき、水面を漂って充電したら潜るというようなしくみで長時間活動できます。あるいは海底に熱水活動がある場所では熱水発電の技術を利用して発電し、そこにステーションを作っておくことで、このステーションをベースに動くということも考えられます。
このように、AUV 自身のアビリティを拡張するとともに、ASVや海底ステーションなど複数のプラットフォームと連携させることで、船舶をベースとする従来の観測手法では考えられなかったような広範囲・高精度・長期間の海底観測を実現するシステムを提案してゆきたいと考えています。
巻研究室:http://makilab.iis.u-tokyo.ac.jp/index.html
Maki Lab.(YouTubeチャネル):https://www.youtube.com/@makilabo
(2023年1月18日 東京大学生産技術研究所 巻研究室において 取材・構成:田中奈美)
#南極 #兵庫県神戸市 #「未然課題」連続インタビュープロジェクト #自律型水中ロボット #海中海底プラットフォームシステム
Related topics関連記事
-
2024.03.12
数式を道具に、循環する社会の実現を研究する(下)|本間裕大
#「未然課題」連続インタビュープロジェクト #数理最適化モデリング #最適配置 #凸空間
-
2024.03.12
数式を道具に、循環する社会の実現を研究する(上)|本間裕大
#「未然課題」連続インタビュープロジェクト #数理最適化モデリング #最適配置 #シミュレーション
-

2024.02.14
需要側の視点でエネルギーシステムの課題を考える|岩船由美子
#「未然課題」連続インタビュープロジェクト #再生可能エネルギー #3E+S #デマンドレスポンス #HEMS
-

2024.02.05
宇宙ロボットのインテリジェンスを研究する(上)|久保田孝
#「未然課題」連続インタビュープロジェクト #宇宙ロボット #無人探査機 #はやぶさプロジェクト #宇宙大航海時代